Design Techniques–III
Backtracking¶
N-Queen's Problem (4/8)¶
- Time Complexity -> O(n!)
- Back tracking approach to find all solutions
- from root node assign all possible values to the queen node in DFS order
- At any point, if row/column/diagonal rule broken, preempt the branch!
Hamiltonian Cycle¶
- NP Hard Problem
- Exponential time taking problem
- Articulation point -> if present, hamiltonian cycle not possible in graph
- It is a single point which joins two parts of a graphs via a single point
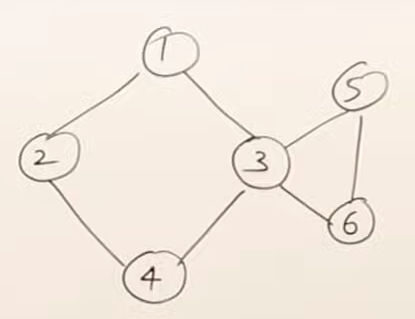 3 is the articulation point here!
3 is the articulation point here!
- It is a single point which joins two parts of a graphs via a single point
- Algorithm
- Initially the array of cycle elements are 0
- We fix a starting vertex to avoid duplicate cycles
- choose a vertex from the graph such that it has a edge to the previous node.
- Bounding Function Checks
- Do not take any duplicates
- Whenever taking a vertex, there should be an edge from the previous vertex
- When on the last vertex, there should be an edge to the first vertex
- Complexity:
- For N nodes, we do n! steps
- n! = (n * n-1 * n-2 ... *1)
- which is approximately equal to O(\(n^n\))
Graph Colouring¶
- Color Vertex here not EDGE! i.e. we assign the colour to the vertex and not the edge.
- Optimisation Problem -> Minimum number of colours required for Colouring the graph
- mColouring Decision Problem -> Given colors, can we color the graph with only these many colours | aka Chromatic Problem
- Base conditions
- if color matches with adjacent node's color, preempt the branch
- Applications
- Time table design
- Map coloring S.T no two connected regions share the same colour
- T.C -> O(\(m^v\)) .. Where m-> Number of colors | v -> Number of Vertex
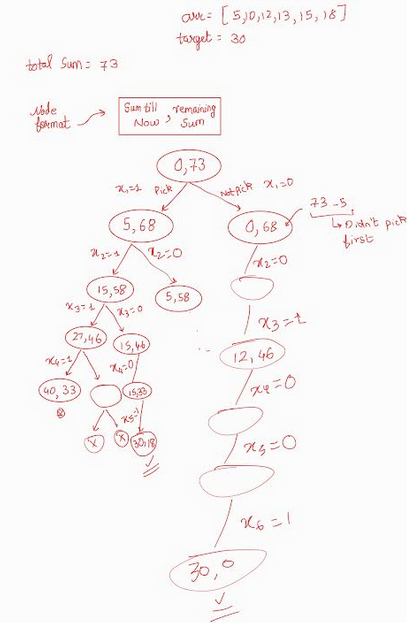
Subset Sum¶
- Given : input array of numbers , targetValue
- Base conditions:
- Sum/weight till now should be less than or equal to targetValue
- remaining weight of the array should be greater than or equal to the remaining (targetValue -currentSum )
- Tree constructed as -> Weight Included or Not Included (i.e. 2 children)..
0/1 Knapsack¶
- use Pick not pick logic to build tree to maximize the profit by choosing the best possible combination for the knapsack problem
- Input -> Array of Profit, Weight for n objects AND knapsack size
- Bounding condition
- current weight should be less than or Equal to our knapsack weight!
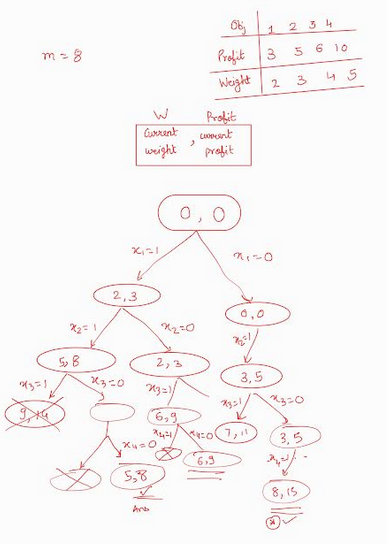
- current weight should be less than or Equal to our knapsack weight!
- Time Complexity -> O(2^n)
Branch and Bound¶
- Similar to back tracking -> uses a state space tree as well
- Useful for solving optimzation problems
- We can only solve minimization problems using this
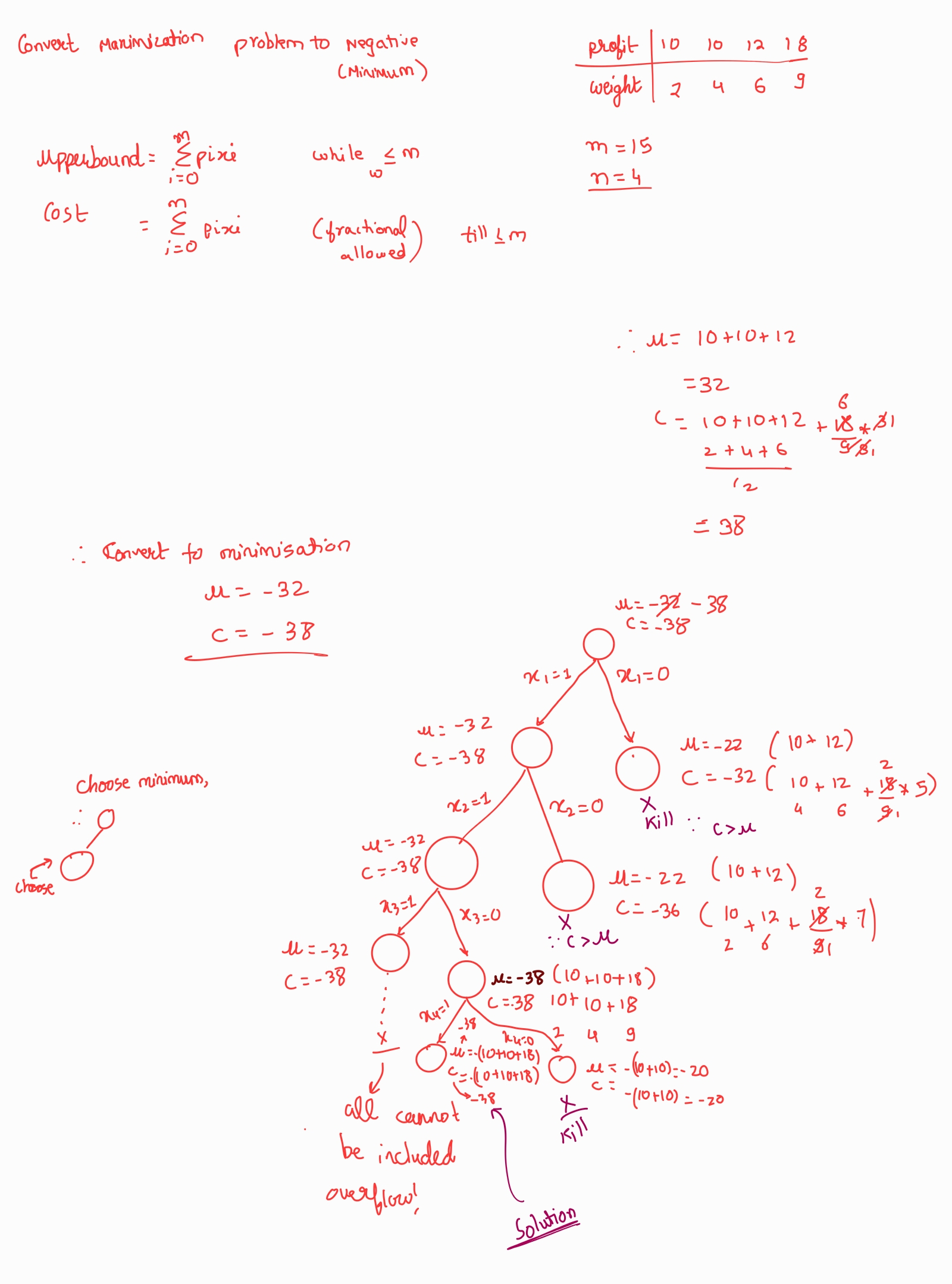
0/1 knapsack problem¶
- Maximization problem has to be converted to minimization problem
- Least Cost Branch Bound method used, explore the node with minimum cost
- upperBound (u) = sum of all the profits till their total weight is less than knapsackSize
- cost -> sum of all the profits, ( with fractions included) for minimization part and not as part of problem
- fixed size solution -> {0,1,1,0} | 1-> pick , 0 -> not pick
- If at any point the cost of a node is greater than upper, kKill the node!
- Continue till you have killed all nodes except one which would be the answer node.
Travelling Sales Man Problem¶
- Update given cost matrix by reducing the matrix M
- In this algorithm when generating tree we travel in level order and not DFS!
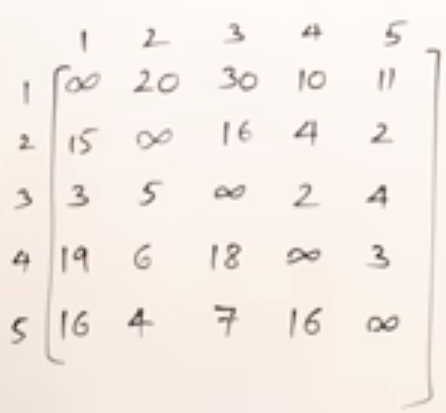 reduce by removing minimum element from each row from the entire row and then the minimum element from each colum from the entire column.
reduce by removing minimum element from each row from the entire row and then the minimum element from each colum from the entire column.
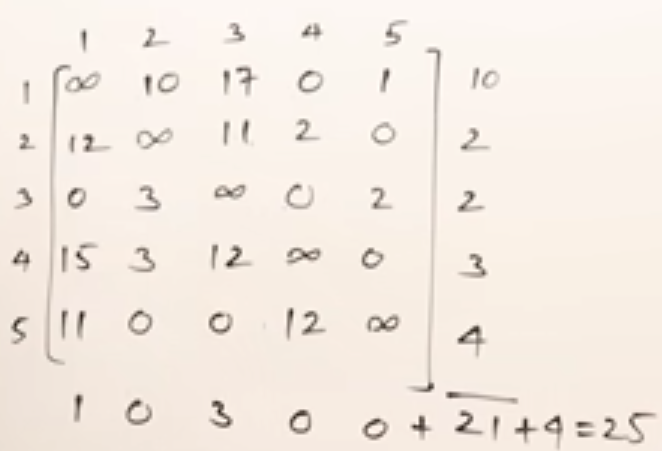
- cost of the first matrix is the reduced cost i.e. here 25
- When going from vertex 1 to 2, make the first row and second column as \(\infty\) , similarly, we wouldn't want to go back to 1 from 2 again, so update 2,1 to \(\infty\) .
- cost of vertex -> cost of edge from previous to current +cost of previous vertex+ current reduction cost
- In the next iteration, we have to make all previous values from current vertex to infinity to avoid going back to ancestor vertex
- of all the leaves, pick the one with the least cost
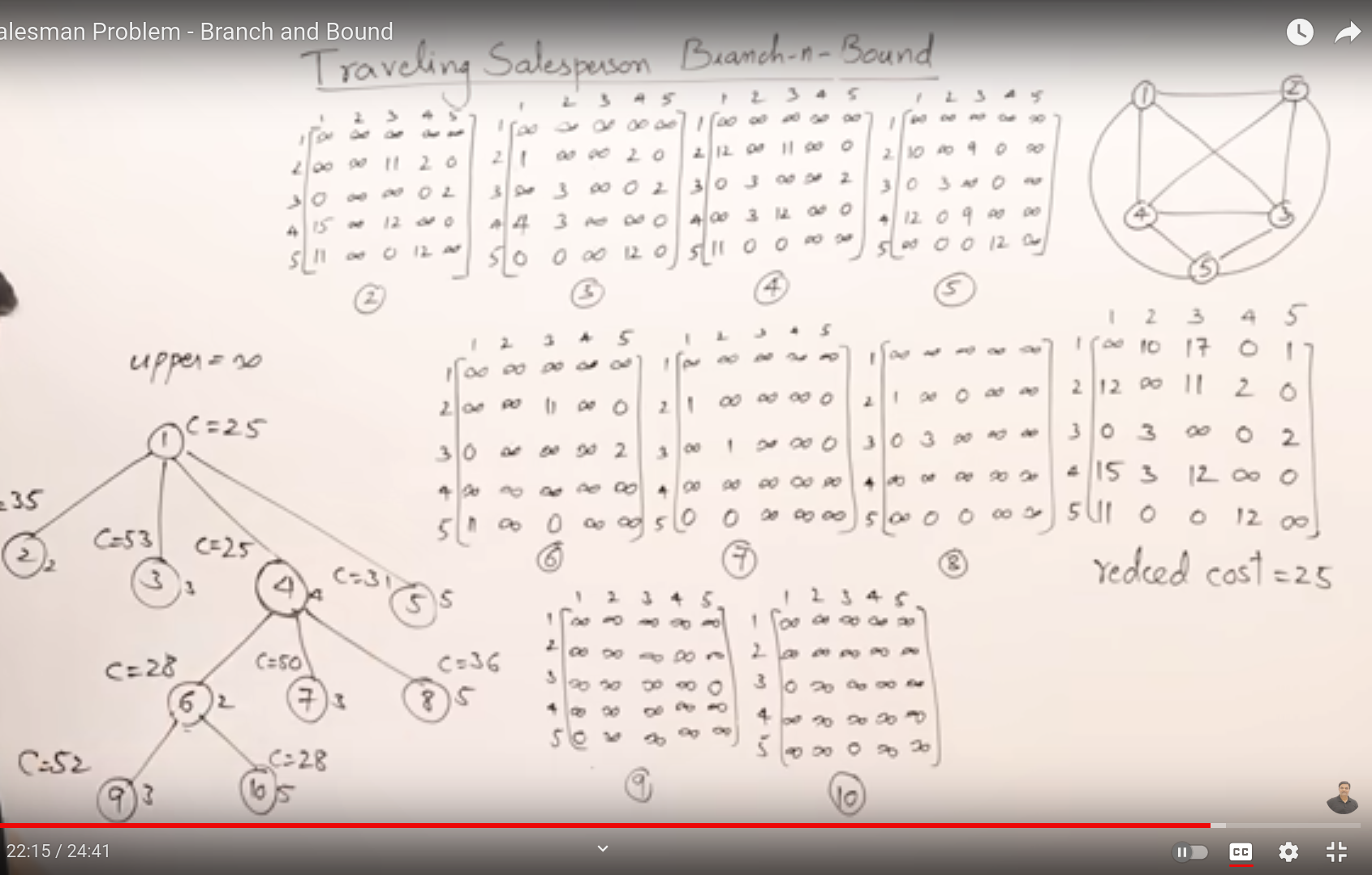
- Quit When you have reached a leaf node and all the other costs are greater than or equal to the leaf node's cost!
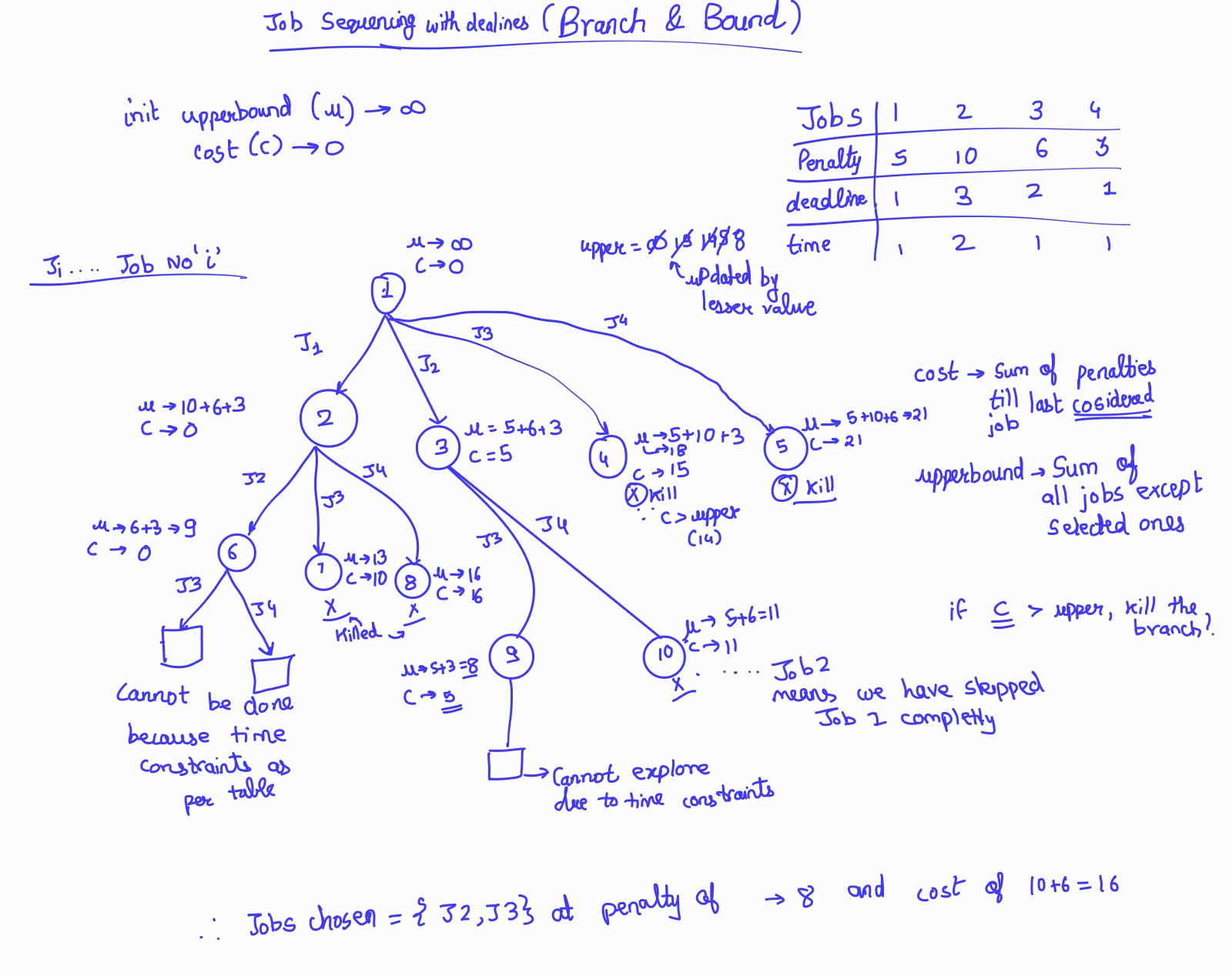
Job Sequencing with Deadlines¶
- Input -> 3 array of length n
- Penalty (time)
- deadline
- time
- Approach by generating state space tree with cost and upper bound
- upper bound -> sum of all penalties except that included in solution
- cost -> sum of penalties till the last job considered
- Also make sure to tally your branch with the time parameter as some meetings cannot be scheduled after a certain time frame has passed and thus the branch also might be killed due to that